在蔚來1月10日起推送的智能系統「Banyan 榕 3.1.0」中,增加了一項全新的智能安全輔助功能——「自動緊急避讓 AES」,可以在前方制動距離不足、但臨側具備可緊急變道的空間條件下,通過橫向避讓實現風險的躲避。
「自動緊急避讓 AES」是目前智能安全領域的技術塔尖,行業裏能量產這項技術的車企屈指可數。因為相比「自動緊急制動 AEB」,「自動緊急避讓 AES」的觸發條件更加苛刻,對於場景的準確分析與決策、誤觸率的控制自然也提出了更高的要求。
所以,「自動緊急避讓 AES」不管在行業層面還是在用戶層面,都還處於相對陌生的狀態。為此,我們總結了十問十答,就大家最關心「自動緊急避讓 AES」的幾個問題,進行解答。
一、蔚來為什麼要開發「自動緊急避讓 AES」?
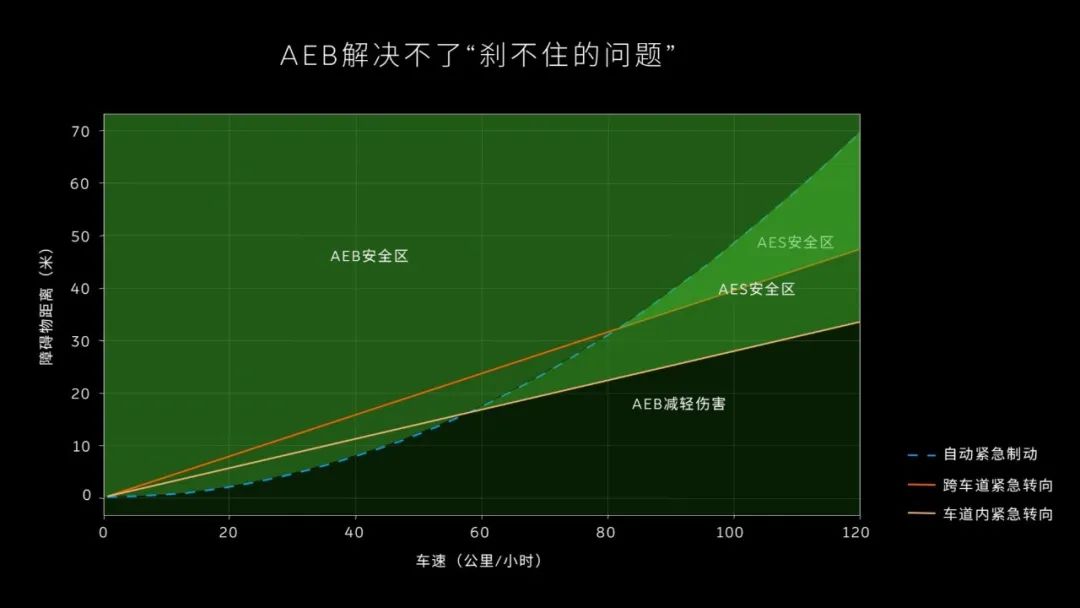
大多數情況下,「制動」都是緊急避險的優先選項。但是速度越高,需要的制動距離也會指數上升,如果風險突然出現而制動距離不足以避免事故,即便「自動緊急制動 AEB」能力再強,也無法突破制動距離與速度關係的物理極限。
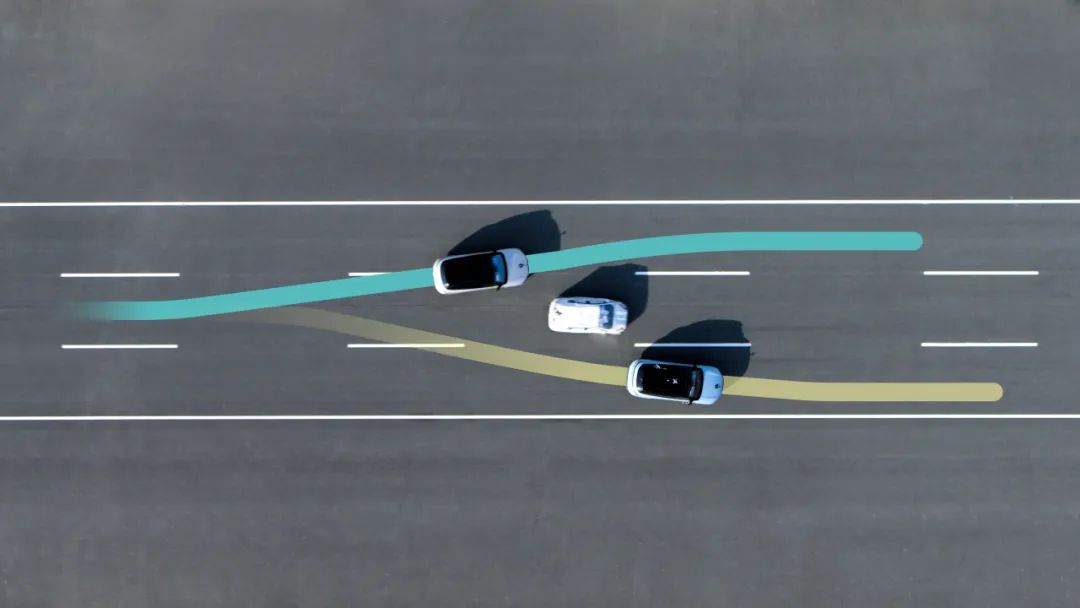
此時,通過「轉向」來解決「制動」剎不住的問題,就成為值得探索的方向。當「自動緊急制動 AEB」無法有效避險時,「自動緊急避讓 AES」僅需要較小的前向距離來向旁側進行借道避讓,就可以突破緊急避險僅依靠制動的天花板,做到「既能剎,也能避」。
所以,「自動緊急避讓 AES」能有效提高智能安全的避險上限,也一定是接下來全行業會跟進的智能安全功能。
二、蔚來「自動緊急避讓 AES」在哪些場景下會觸發?
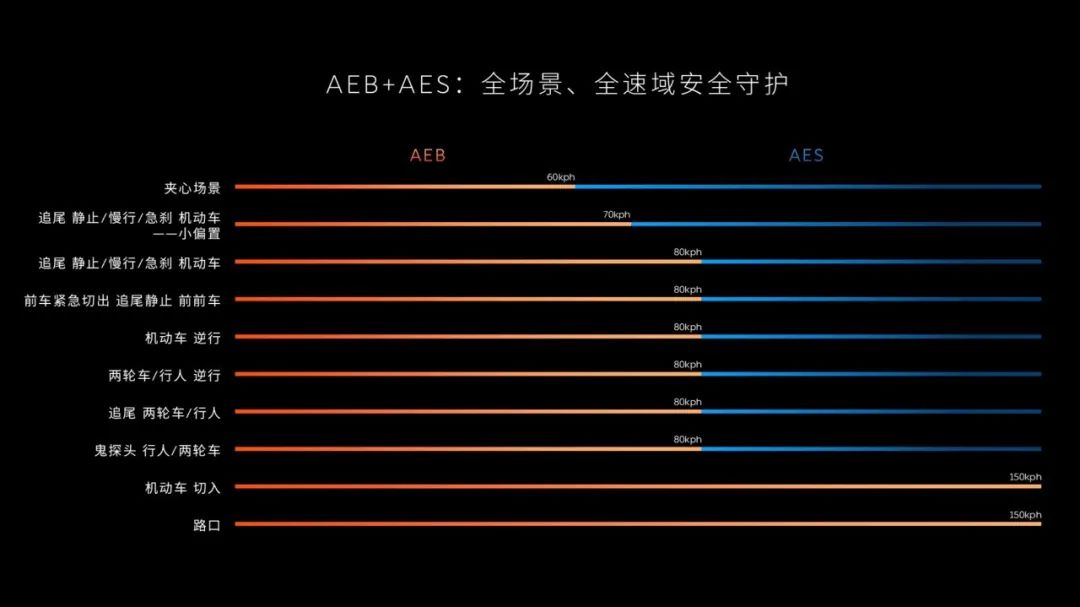
蔚來「自動緊急避讓 AES」可觸發速度區間是60-150km/h,覆蓋了五大場景,可以總結為「一追、二對、三橫、四切、五夾」。
高速追尾場景:自車速度70km/h以上,前方有靜止/慢行/急剎的汽車,或自車速度80km/h以上,前方有靜止/慢行的二輪車、行人。
對向逆行場景:自車速度80km/h以上,前方有對向逆行的汽車、二輪車、行人。
二輪車、行人橫穿場景:自車速度80km/h以上,前方有橫穿/斜穿/鬼探頭的二輪車、行人。
前車緊急切出場景:自車速度80km/h以上,前車緊急切出後,前方有汽車、二輪車、行人。
夾心追尾場景:自車速度60km/h以上,前車緊急制動,後車相對自車速度15km/h以上,自車存在被追尾風險。
所以,蔚來「自動緊急避讓 AES」做到了「主動識變、應變求變」,既能在高速工況下進行緊急避險,也能在中低速工況下進行主動閃躲,充分挖掘出避讓的優勢。
三、「自動緊急避讓 AES」與「緊急避讓輔助」、「緊急車道保持」有什麼區別?
在「自動緊急避讓 AES」出現之前,一些品牌也有一個聽起來名字比較類似的功能,叫做「緊急車道保持」或者「緊急避讓輔助」。但事實上,它們與「自動緊急避讓 AES」完全不同。
「緊急車道保持」或者「緊急避讓輔助」功能實現的前提,都是人為首先轉向,在力度不足的情況下,系統幫助一把。而「自動緊急避讓 AES」針對的是駕駛員分心時,面對風險完全沒有對方向盤執行操作,系統自動完成轉向避讓。
「緊急車道保持」在歐洲的法規下是強制裝備功能,蔚來在售車型也全系標配。而「自動緊急避讓 AES」是智能安全領域的最新成果,目前行業僅有包括蔚來在內的三家車企實現搭載。

四、蔚來「自動緊急避讓 AES」有哪些特性是「行業唯一」?
蔚來「自動緊急避讓 AES」在觸發速域、識別對象、場景覆蓋上,均處於行業領先地位,並有三個「行業唯一」。
行業唯一「覆蓋中低速至超高速範圍」:蔚來「自動緊急避讓 AES」可在60-150km/h速度範圍內響應,覆蓋速域範圍行業最廣。
行業唯一「響應行人鬼探頭」:蔚來「自動緊急避讓 AES」可以在自車80km/h速度以上,以轉向躲避鬼探頭的行人。
行業唯一「實現夾心場景下防被追尾」:蔚來「自動緊急避讓 AES」行業首創應對連環追尾夾心場景,可在前車急剎車、自車60km/h以上、後車相對速度15km/h以上的場景下,實現主動避讓。
這三個「行業唯一」,有效覆蓋了潛在風險較高的真實場景,擴展了「自動緊急避讓 AES」的響應範圍,提高了避險能力的上限。
五、蔚來為什麼要針對「夾心」場景進行「自動緊急避讓 AES」的設計?
「夾心」場景是「被追尾」場景中一個常見的細分場景,根據蔚來對事故與潛在風險的數據統計,「夾心」場景佔被追尾場景的比例達到35%。而且在三車連環追尾中,位於中間的車輛受到的傷害也是雙重的。因此,蔚來專門針對「夾心」場景,進行了「自動緊急避讓 AES」響應的設計,這也是行業首個既可以避免前碰風險,也可以避免後向被追尾風險的「自動緊急避讓 AES」功能。
在後車與自車相對速度較高的情況下,以「自動緊急避讓 AES」實現避險更有效率。尤其是當後方車輛為大貨車類型時,「自動緊急避讓 AES」帶來的安全收益比急剎車更高。

六、如果「自動緊急避讓 AES」觸發後,與相鄰車道車輛發生碰撞怎麼辦?
蔚來「自動緊急避讓 AES」在功能觸發前,已經對自車前進路徑、左右車道線是否為實線、左右相鄰車道的空間、左右相鄰車道是否存在前後車輛或障礙物、後車車距與速度進行了全面掃描與計算,只有在變道路徑上沒有任何影響因素的情況下,「自動緊急避讓 AES」纔會觸發。任一條件不滿足,「自動緊急避讓 AES」均不會觸發,「自動緊急制動 AEB」會介入工作。
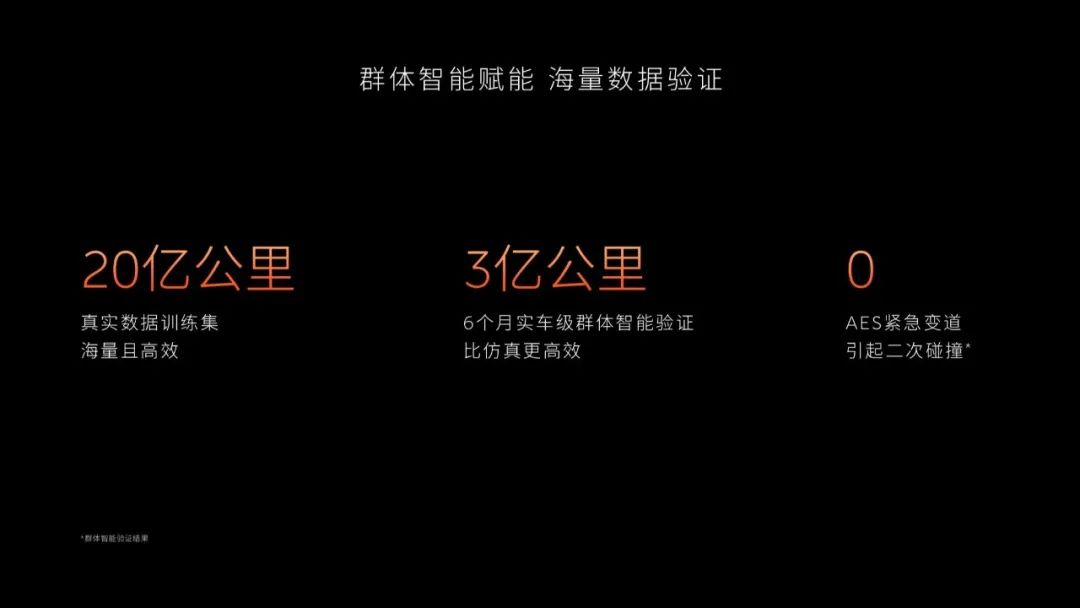
同時,蔚來在「自動緊急避讓 AES」功能推送前,以羣體智能的技術手段進行了超過3億公里的真實場景運行測試,嚴格滿足100萬公里誤觸發小於1次、因誤觸發導致碰撞概率1億公里不多於1次的苛刻指標,用戶可以安心使用。

七、「自動緊急避讓 AES」觸發後,如果駕駛員打方向盤或者踩剎車,車輛聽誰的?
在今天所有能夠合法行駛在公開道路的量產汽車上,人的意志都是汽車執行操作的最高優先級。
當蔚來「自動緊急避讓 AES」功能觸發過程中,如果駕駛員踩制動踏板超過了預設的範圍,或是緊急往反方向轉方向盤,「自動緊急避讓 AES」都會中斷。
如果駕駛員轉方向盤與「自動緊急避讓 AES」轉向的方向相同,且人為輸入力矩小於避免事故所需力矩,「自動緊急避讓 AES」不會中斷。但如果人為輸入力矩大於避免事故所需力矩,「自動緊急避讓 AES」會退出,按照駕駛員的操作進行。

八、「自動緊急避讓 AES」和「自動緊急制動 AEB」之間會發生衝突嗎?
蔚來從真實場景出發,對「自動緊急避讓 AES」進行高標準正向設計,並與「自動緊急制動 AEB」進行了深入融合,可根據場景自主進行「自動緊急避讓 AES」與「自動緊急制動 AEB」的最優解選擇,兩者協同工作,不把功能開關交給用戶決策。
總體來看,兩者之間的協同遵循如下原則:
當「自動緊急避讓 AES」與「自動緊急制動 AEB」均可避免事故,但「自動緊急避讓 AES」更有效時,「自動緊急避讓 AES」介入。
當「自動緊急制動 AEB」無法避免事故,但「自動緊急避讓 AES」可以避免事故時,「自動緊急避讓 AES」介入。
當「自動緊急避讓 AES」無法避免事故,但「自動緊急制動 AEB」可避免/緩解事故時,「自動緊急制動 AEB」介入。
當「自動緊急避讓 AES」,「自動緊急制動 AEB」均無法避免事故時,「自動緊急制動 AEB」介入。
九、「自動緊急避讓AES」最大的量產難點是什麼?
「自動緊急避讓 AES」的量產難點主要有三個:驗證周期長、驗證成本高、對誤觸發有極為苛刻的要求。
傳統開發流程中智能安全的功能驗證,需要使用路測車進行各種工況的真實測試。但這種測試的效率很低,想要充分驗證,就必須有大規模的路測車隊。而且,「自動緊急避讓 AES」的危險度相比「自動緊急制動 AEB」更高,觸發條件更苛刻,誤觸發的體驗對用戶更缺乏安心感,因此驗證的難度也要數倍於「自動緊急制動 AEB」。這是目前量產「自動緊急避讓 AES」功能寥寥的主要原因。
而蔚來在售全系車型因為具備羣體智能的技術手段,可以大幅提升新功能驗證的效率。蔚來在「自動緊急避讓 AES」推送前,首先在雲端進行了20億公里累積的事故數據的大規模測試驗證,並在車端全場景下進行6個月超過3億公里的功能運行測試,確保功能得到充分的複雜真實場景的長里程驗證。這也是蔚來能夠快速、高效量產具備豐富功能的「自動緊急避讓 AES」的先決條件。
十、「自動緊急避讓 AES」是不是在挑戰「讓速不讓道」的安全意識?
因為智能電動汽車感知能力和計算能力的不斷增強,智能安全的進化也在近年來不斷加快。「自動緊急避讓 AES」作為智能安全領域的一項全新功能,在用戶中的認知是薄弱甚至是陌生的。但是,蔚來推送「自動緊急避讓 AES」功能,並非是為了炫技,而是在自身智能安全產品節奏下的合理推進。
2024年,蔚來全球首個將端到端大模型技術架構應用於智能安全,包括行業首個將「通用障礙物預警及輔助 GOA」用於智能安全、行業首個將端到端大模型用於「自動緊急制動 AEB」。而在以AI手段解決了以中低速為主的城市場景安全的基礎上,蔚來繼續擴展中高速戰場,通過「自動緊急避讓 AES」的開發,以更高效率解決相對速度較高時的安全問題。
所以,「自動緊急避讓 AES」的量產,並且與「自動緊急制動 AEB」高度兼容的設計,代表蔚來以新的視角來看待「避險」,以「主動識變、應變求變」的原則面向複雜變化的真實風險場景,從而為用戶創造既有主動制動,也有主動避讓的安全新高度。




文章原文
