全球科創再現杭州力量!近日,菜鳥研發出業內首個自動駕駛高性能大規模強化學習規劃器,將提升菜鳥無人車應對複雜場景的能力。該項研究成果已經被國際頂級學術會議CVPR 2025收錄。
由IEEE舉辦的計算機視覺和模式識別領域頂級國際會議——CVPR 2025,新近公布錄用結果,由浙江大學和菜鳥無人車技術團隊提交的聯合研究成果已被大會接收。聯合研究團隊提出了一個新的一致性自迴歸規劃器CarPlanner(Consistent Auto-regressive Trajectory Planning for Large-scale Reinforcement Learning in Autonomous Driving),解決了強化學習在軌跡規劃方面存在的效率低下和性能不足的問題。在要求極為苛刻的大規模真實世界數據集nuPlan上,菜鳥首次證明基於強化學習的規劃器可以超越基於模仿學習和規則的方案。這也是業內首個自動駕駛高性能大規模強化學習規劃器。

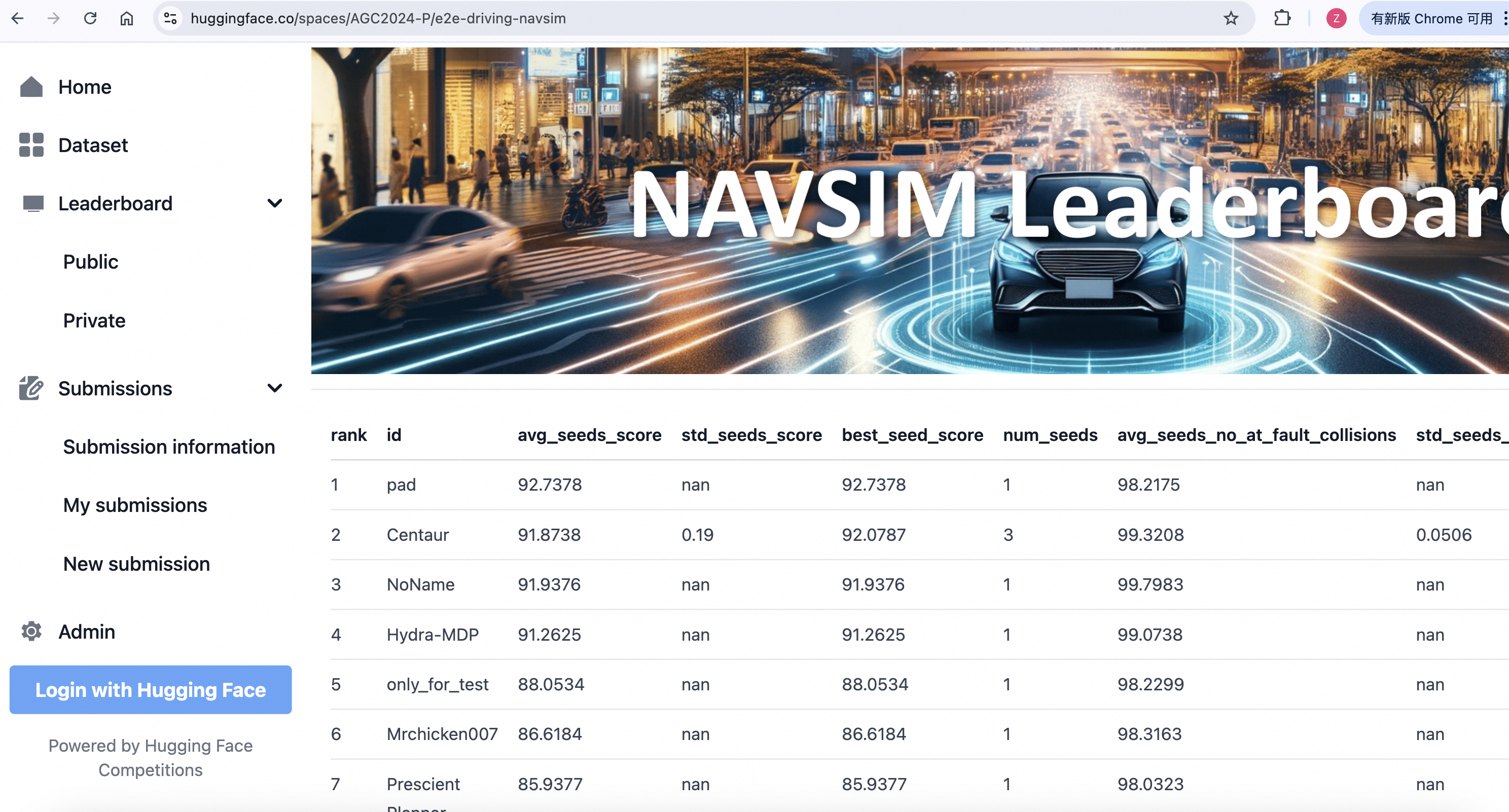
「大家熟知的DeepSeek R1版本就是使用了強化學習的方法,引發了廣泛的關注,在推理能力等方面都有很好的表現。」菜鳥相關技術人員表示,軌跡規劃對於自動駕駛至關重要,可以確保在複雜環境中安全高效地導航,通過研發基於強化學習的規劃器,將進一步提升自動駕駛適應複雜環境的能力,讓自動駕駛更為安全可靠。 此外菜鳥無人車技術團隊與新加坡南洋理工大學聯合研究的一種新型端到端自動駕駛系統(PAD),通過生成高質量的規劃軌跡提高自動駕駛車輛的效率和安全性,這一方案近日在全球知名的自動駕駛仿真和測評平台NAVSIM中登頂排行榜第一名。這一平台排行榜由中、美、德、加、新等多國高校以及英偉達、博世等企業共同提出。
目前,菜鳥正在持續推進物流科技的商業化和出海,菜鳥L4級公開道路無人車已面向全國銷售,在30多個區縣上路運營;菜鳥自動化和數字化項目已在全球28個國家落地超過600個。