
作者 | 章漣漪
編輯 | 邱鍇俊
繼小米之後,華為也發生了一起事故。
4月13日下午,一輛問界M7 Pro在遼寧瀋陽工業展覽館發生碰撞事故,造成一名人員受傷。
對此,問界方面回應稱,經初步調查,事故發生於車展撤展前夕,車輛未處於展車模式,導致車輛被誤啓動。因主駕未系安全帶,且方向盤大角度干預,不滿足AEB觸發條件。
問界對於事故的回應
但此前,無論是華為終端BG董事長餘承東,還是華為車BU CEO靳玉志都多次渲染AEB(自動緊急制動)的強大,卻沒有介紹它的缺陷。
現實是,不管是哪家企業,被宣傳為「救命神器」的AEB系統都不是萬能的,它像是汽車的安全氣囊,但絕不能替代安全帶。
在自動駕駛浪潮不斷滾滾向前時,也應注意,不可過度神化了單一項技術。畢竟,最可靠的「主動安全系統」,始終是駕駛座上那個保持警惕的人類大腦。
01
AEB存在諸多盲區
智駕,一直是華為引以為傲的點。
去年4月,北京車展前夕,華為發布ADS 3.0時提到,實現主動安全更進一步。在AEB剎車距離不足的場景下,系統自動緊急轉向避障,無需人先打方向盤觸發,側向主動安全也支持更多的場景,例如支持斜穿、橫穿的車輛、自行車和電動車;支持更靈活的避讓空間。

餘承東稱問界M9大五座車型AEB能力加強
同年9月,問界M9大五座車型上市發布會上,餘承東表示,前向AEB能力得到了加強,能夠支持對斜穿行人和兩輪車行為的預判,其最大生效範圍為4-150km/h。在智駕與人駕協同的情況下,剎停時速可以提升至120km/h,而在靜止行人場景下,人駕的剎停時速可以達到110km/h。
但他們都沒有說的是,鴻蒙智行的車輛功能設計中,不繫安全帶是不會觸發AEB的。因為如果緊急強力制動可能會把駕乘人員從座位上甩出去。另外,大幅度轉向也不會觸發AEB,因為大幅度轉向時輪胎抓地力減小,如果緊急強力制動可能會讓車輛有側翻風險。
當然,這也是大部分車企的選擇。
而就在半個月前的3月29日深夜,小米汽車也經歷了類似的AEB爭議。
在當時的事故中,有不少人質疑「為什麼車輛距離錐桶這麼近了,AEB功能卻沒有發揮作用」?
這一問題小米汽車以問答的形式進行了回應。
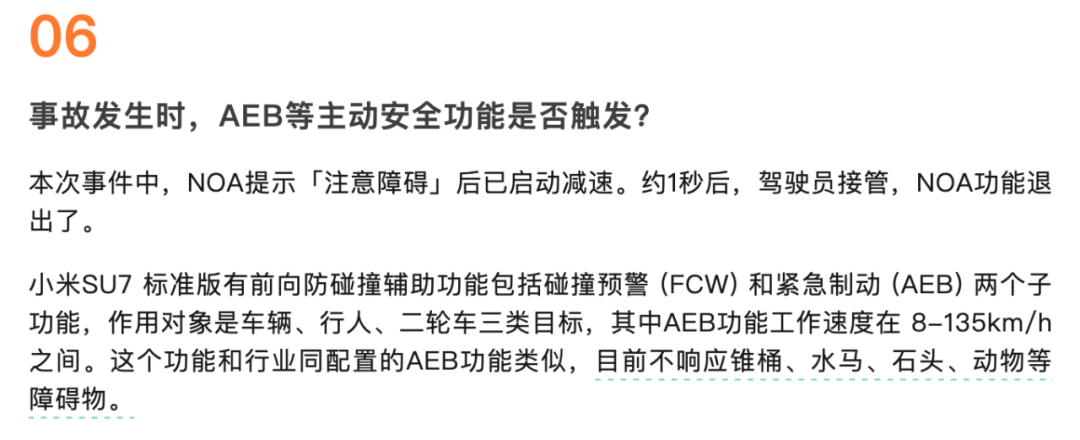
小米汽車回應AEB是否觸發
它表示,本次事件中,NOA提示「注意障礙」後已啓動減速。約1秒後,駕駛員接管,NOA功能退出了。
小米SU7標準版有前向防碰撞輔助功能,包括碰撞預警 (FCW) 和緊急制動 (AEB) 兩個子功能,作用對象是車輛、行人、二輪車三類目標,其中AEB功能工作速度在8-135km/h之間。這個功能和行業同配置的AEB功能類似,目前不響應錐桶、水馬、石頭、動物等障礙物。
從小米汽車的回應中可以確定的是,事故車輛的AEB功能並沒有被觸發。
這也是它首次對外明確表示,AEB功能目前不響應錐桶、水馬、石頭、動物等障礙物。
而在過去,小米創始人雷軍在SU7上市發布會上對AEB的介紹是,自動緊急制動功能在135km/h的白天高速、120km/h的夜間高速下,成功識別前方車道靜止的故障車並立即剎停。
顯然,車企在宣傳AEB作為「安全」的一面時,往往回避了其存在的技術瓶頸。
02
對行車安全有一定的加持
在聊瓶頸之前,先要聊一下AEB到底是什麼,是否有用?
AEB,全稱Autonomous Emergency Braking,自動緊急制動。
先進駕駛輔助系統(ADAS)的快速發展帶來了多項主動安全技術,AEB就是其中非常重要的一種。
它由感知、決策和執行層組成,是輔助駕駛算法,其基本原理是通過毫米波雷達、攝像頭、激光雷達等傳感器感知車輛周圍信息,並將採集信息傳輸到控制模塊,控制模塊根據信息和車輛狀態來判斷自車的危險情況。
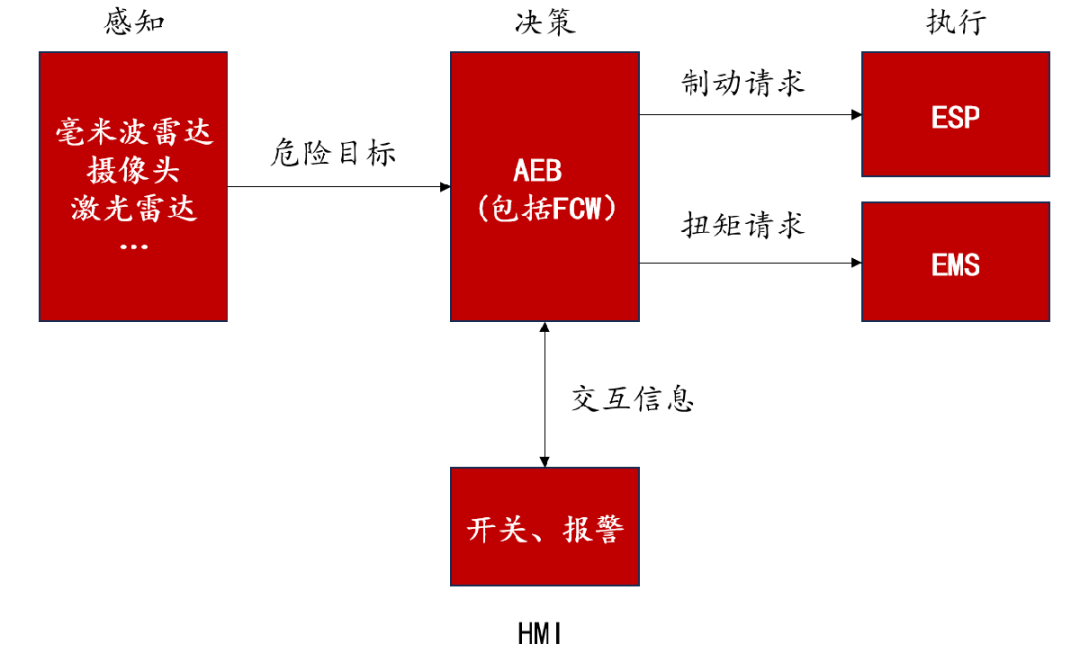
AEB技術邏輯。資料來源:齊偉《淺析AEB自動緊急制動系統》
當判斷出車輛存在碰撞風險時,系統會對駕駛員進行警告提示;若駕駛員未及時做出避撞動作,AEB系統將主動介入制動系統使自車降速或停止。
早在2002年、2003年,奔馳、本田、豐田等車企就已經開始嘗試落地AEB功能。目前來看,AEB已經成為ADAS功能體系裏最基礎、最核心的功能之一,被消費者認為是主動安全的一道防線。
AEB又包括碰撞迫近制動系統(CIB)和動態制動支持系統(DBS)兩個子系統。其中,CIB系統會在追尾和駕駛員未採取任何行動的情況下,對車輛進行緊急制動;DBS會在駕駛員沒有施加足夠的制動力時,主動增加制動力避免碰撞。
其重要參數是碰撞時間(TTC),即行駛車輛計算出和前方物體可能發生碰撞所需要的時間,定義為自車與障礙物之間的距離除以相對速度。AEB系統的避撞核心邏輯是要確定合適的介入時刻,當TTC足夠小時,AEB系統採取制動措施。
AEB系統啓動時,主要遵循兩個原則:一是不能影響用戶體驗,即駕駛員有時間做出反應時不可提前啓動;二是確保制動效能,即制動時刻應早於制動系統將車輛剎停的最遲制動時刻,從而實現避撞目的。
理論上來說,AEB可以有效減少安全事故發生。
美國國家公路交通安全管理局(NHTSA)數據顯示,超過90%的嚴重撞車事故的主要原因是駕駛員本身的失誤。
Euro NCAP認為AEB能改善車輛安全性
而根據Euro NCAP(歐洲新車安全評鑑協會)的研究數據,安裝AEB的車輛可以將追尾事故減少38%,致命撞車事故減少20-25%,受傷的可能性減少25-30%。
這意味着,AEB功能對行車安全起到了一定作用,且隨着功能完善將越發重要。
03
AEB存在四大「致命缺陷」
但AEB顯然不是萬能的,並不是在所有情況下都能發揮作用,甚至會造成一些新問題。
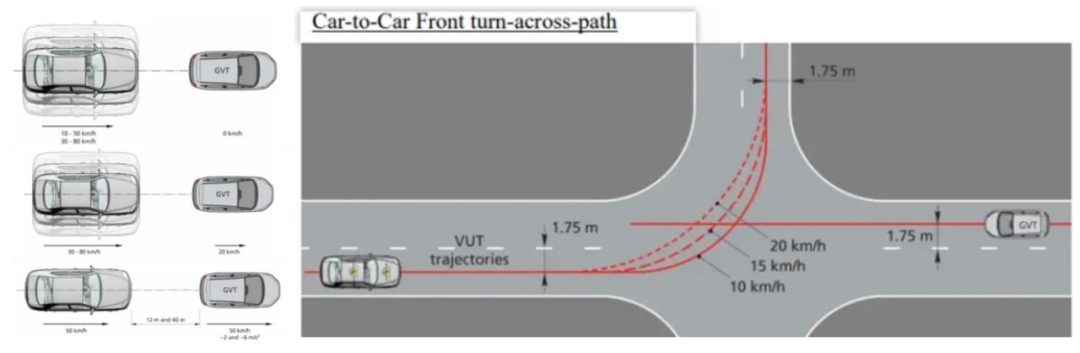
一是場景侷限,對橫穿車輛、異型車(如工程車)識別率驟降。
在最初簡單的AEB方案中,系統主要標定的障礙物就是車輛和行人,至於兒童、寵物、雪糕筒,以及一些異形檢測物都無法識別。但隨着傳感器產品的成熟,傳感器硬件的不斷疊加,逐步彌補感知能力的短板,但感知場景標定的豐富度和算法訓練依然存在CornerCase。
這導致AEB系統對橫穿車輛、異型車輛存在識別侷限。同時,面對惡劣天氣和光線條件、低速和高速場景、靜態目標識別都存在一定的問題。
二是誤觸發風險,隧道陰影可能引發幽靈剎車。
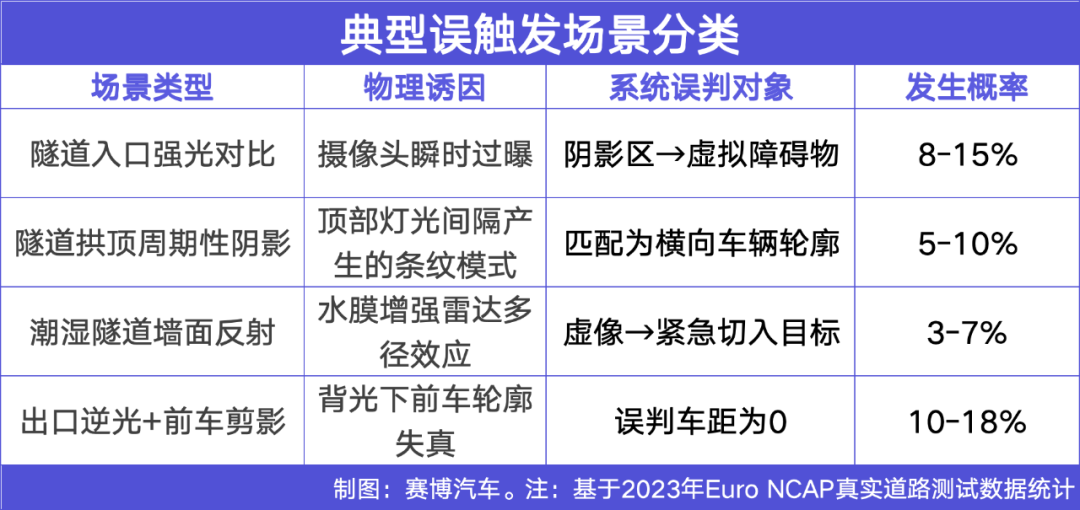
AEB系統誤觸發的根本原因在於其技術侷限性和算法缺陷。AEB系統依賴傳感器(如攝像頭、雷達)來感知前方環境,但在光線變化、惡劣天氣或複雜路況下,傳感器的準確性會大幅下降。與此同時,多傳感器融合算法也存在不足。不同傳感器的數據同步和融合算法可能出現誤差,導致系統誤判前方存在障礙物。
其危險在於後車追尾風險增加(尤其高速路段)、乘客頸部可能因急剎受傷、引發駕駛員對輔助駕駛系統的信任危機等。
特斯拉就因AEB誤觸發問題多次召回車輛。
三是,AEB制動鏈路存在「延遲」。
從目標出現到完全制動,AEB系統經歷不可壓縮的5個關鍵階段,每個階段都吞噬寶貴時間。晴天至少需要0.3-0.5秒,雨天或延長至0.8秒。駕駛員需要時刻關注。儘管這一延遲時間在正常情況下可以接受,但在雨天等惡劣條件下,其延長的響應時間可能會降低系統的可靠性。
四是責任困境,系統介入可能導致二次事故,產生責任如何劃分等問題。
2022年,一輛搭載博世第三代AEB系統的某車型在德國高速公路上行駛,系統誤將前方卡車掉落的紙箱識別為障礙物,突然緊急制動,後方貨車因跟車過近追尾,導致3車連環相撞,2人輕傷。
這產生了責任爭議,車主指控AEB系統「過度反應」,後車司機主張「前車無故急剎」應負全責,博世以「符合ISO 22179標準」抗辯。
最終,法院判決車企承擔30%責任,AEB算法未充分評估誤制動風險;後車承擔70%責任,未保持安全距離(德國法定最低2秒車距);博世免責,系統符合「合理預期」標準。

儘管德國制定的《自動化和網聯化車輛交通倫理準則》明確指出,自動駕駛系統在發生事故時,應將人類安全置於首位,並禁止基於個人特徵的選擇性犧牲。然而,在實際操作中,如何平衡技術的侷限性和倫理原則,仍然是一個亟待解決的問題。
總得來看,AEB顯然不是「萬能護身符」,其物理傳感器存在不可逾越的探測極限。在可預見的未來,駕駛員對特殊場景的主動預判仍是不可替代的安全防線。
作為車企,揚長避短的宣傳,也是一種不負責任的表現。作為駕駛員,請記住當你在路上看到遇到惡劣天氣、環境,或看到黃色工程車等時,默認AEB不存在,這也是智能時代的生存智慧。