全球科创再现杭州力量!近日,菜鸟研发出业内首个自动驾驶高性能大规模强化学习规划器,将提升菜鸟无人车应对复杂场景的能力。该项研究成果已经被国际顶级学术会议CVPR 2025收录。
由IEEE举办的计算机视觉和模式识别领域顶级国际会议——CVPR 2025,新近公布录用结果,由浙江大学和菜鸟无人车技术团队提交的联合研究成果已被大会接收。联合研究团队提出了一个新的一致性自回归规划器CarPlanner(Consistent Auto-regressive Trajectory Planning for Large-scale Reinforcement Learning in Autonomous Driving),解决了强化学习在轨迹规划方面存在的效率低下和性能不足的问题。在要求极为苛刻的大规模真实世界数据集nuPlan上,菜鸟首次证明基于强化学习的规划器可以超越基于模仿学习和规则的方案。这也是业内首个自动驾驶高性能大规模强化学习规划器。

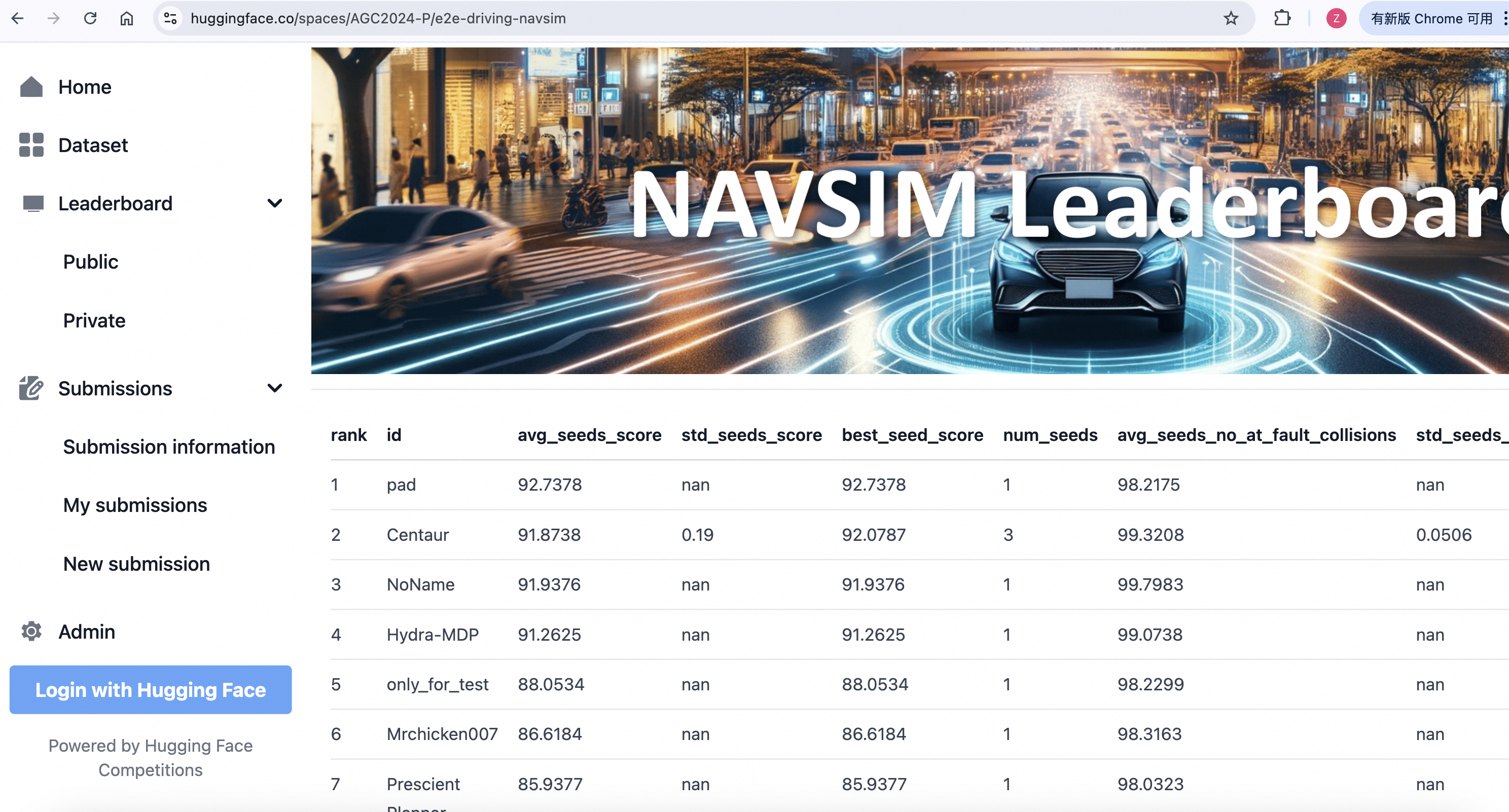
“大家熟知的DeepSeek R1版本就是使用了强化学习的方法,引发了广泛的关注,在推理能力等方面都有很好的表现。”菜鸟相关技术人员表示,轨迹规划对于自动驾驶至关重要,可以确保在复杂环境中安全高效地导航,通过研发基于强化学习的规划器,将进一步提升自动驾驶适应复杂环境的能力,让自动驾驶更为安全可靠。 此外菜鸟无人车技术团队与新加坡南洋理工大学联合研究的一种新型端到端自动驾驶系统(PAD),通过生成高质量的规划轨迹提高自动驾驶车辆的效率和安全性,这一方案近日在全球知名的自动驾驶仿真和测评平台NAVSIM中登顶榜单第一名。这一平台榜单由中、美、德、加、新等多国高校以及英伟达、博世等企业共同提出。
目前,菜鸟正在持续推进物流科技的商业化和出海,菜鸟L4级公开道路无人车已面向全国销售,在30多个区县上路运营;菜鸟自动化和数字化项目已在全球28个国家落地超过600个。