在蔚来1月10日起推送的智能系统“Banyan 榕 3.1.0”中,增加了一项全新的智能安全辅助功能——“自动紧急避让 AES”,可以在前方制动距离不足、但临侧具备可紧急变道的空间条件下,通过横向避让实现风险的躲避。
“自动紧急避让 AES”是目前智能安全领域的技术塔尖,行业里能量产这项技术的车企屈指可数。因为相比“自动紧急制动 AEB”,“自动紧急避让 AES”的触发条件更加苛刻,对于场景的准确分析与决策、误触率的控制自然也提出了更高的要求。
所以,“自动紧急避让 AES”不管在行业层面还是在用户层面,都还处于相对陌生的状态。为此,我们总结了十问十答,就大家最关心“自动紧急避让 AES”的几个问题,进行解答。
一、蔚来为什么要开发“自动紧急避让 AES”?
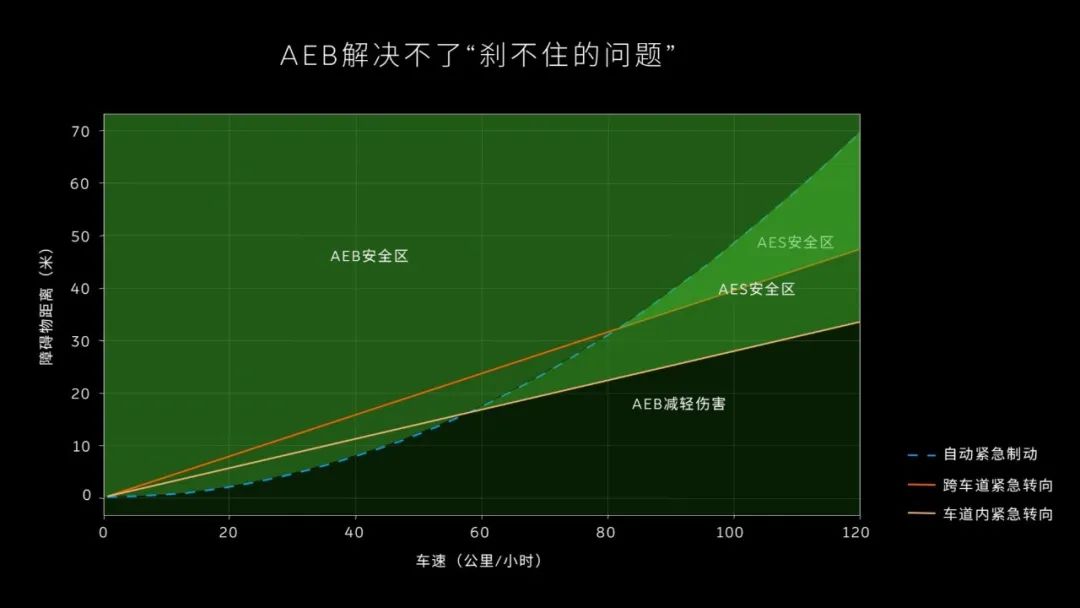
大多数情况下,“制动”都是紧急避险的优先选项。但是速度越高,需要的制动距离也会指数上升,如果风险突然出现而制动距离不足以避免事故,即便“自动紧急制动 AEB”能力再强,也无法突破制动距离与速度关系的物理极限。
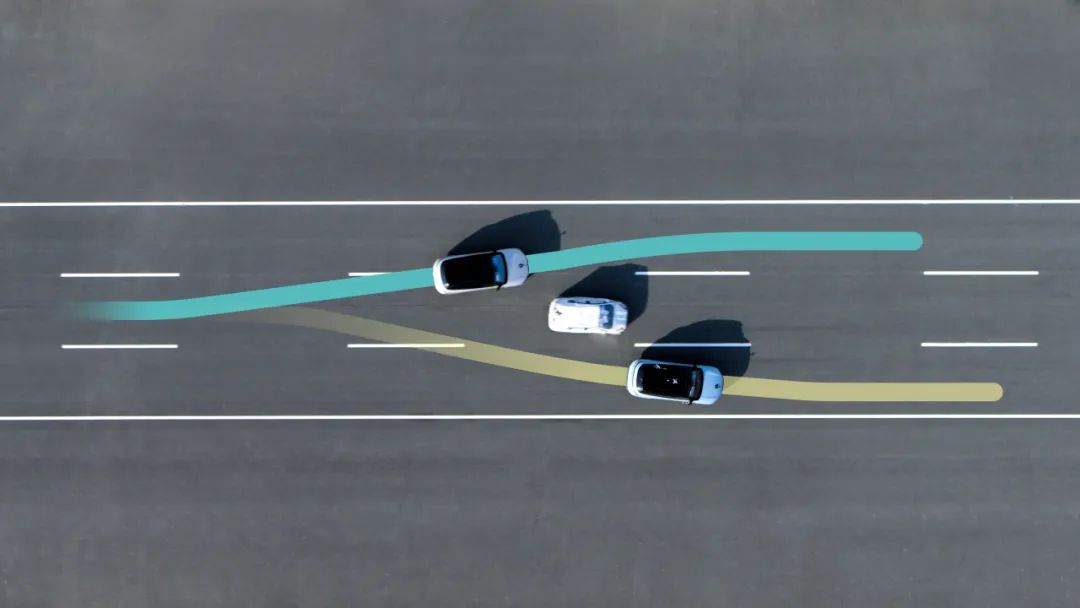
此时,通过“转向”来解决“制动”刹不住的问题,就成为值得探索的方向。当“自动紧急制动 AEB”无法有效避险时,“自动紧急避让 AES”仅需要较小的前向距离来向旁侧进行借道避让,就可以突破紧急避险仅依靠制动的天花板,做到“既能刹,也能避”。
所以,“自动紧急避让 AES”能有效提高智能安全的避险上限,也一定是接下来全行业会跟进的智能安全功能。
二、蔚来“自动紧急避让 AES”在哪些场景下会触发?
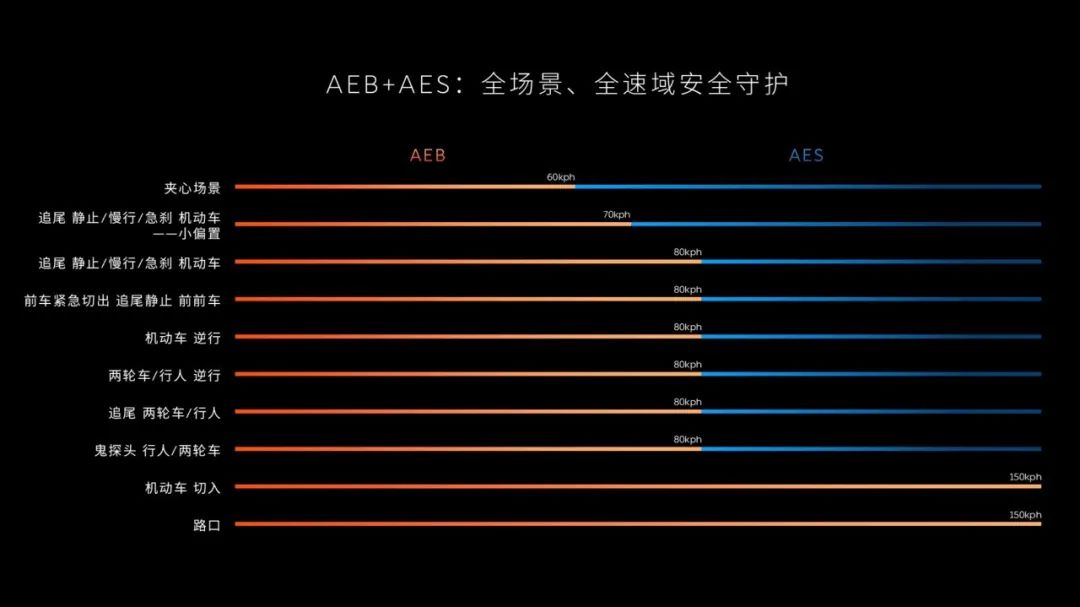
蔚来“自动紧急避让 AES”可触发速度区间是60-150km/h,覆盖了五大场景,可以总结为“一追、二对、三横、四切、五夹”。
高速追尾场景:自车速度70km/h以上,前方有静止/慢行/急刹的汽车,或自车速度80km/h以上,前方有静止/慢行的二轮车、行人。
对向逆行场景:自车速度80km/h以上,前方有对向逆行的汽车、二轮车、行人。
二轮车、行人横穿场景:自车速度80km/h以上,前方有横穿/斜穿/鬼探头的二轮车、行人。
前车紧急切出场景:自车速度80km/h以上,前车紧急切出后,前方有汽车、二轮车、行人。
夹心追尾场景:自车速度60km/h以上,前车紧急制动,后车相对自车速度15km/h以上,自车存在被追尾风险。
所以,蔚来“自动紧急避让 AES”做到了“主动识变、应变求变”,既能在高速工况下进行紧急避险,也能在中低速工况下进行主动闪躲,充分挖掘出避让的优势。
三、“自动紧急避让 AES”与“紧急避让辅助”、“紧急车道保持”有什么区别?
在“自动紧急避让 AES”出现之前,一些品牌也有一个听起来名字比较类似的功能,叫做“紧急车道保持”或者“紧急避让辅助”。但事实上,它们与“自动紧急避让 AES”完全不同。
“紧急车道保持”或者“紧急避让辅助”功能实现的前提,都是人为首先转向,在力度不足的情况下,系统帮助一把。而“自动紧急避让 AES”针对的是驾驶员分心时,面对风险完全没有对方向盘执行操作,系统自动完成转向避让。
“紧急车道保持”在欧洲的法规下是强制装备功能,蔚来在售车型也全系标配。而“自动紧急避让 AES”是智能安全领域的最新成果,目前行业仅有包括蔚来在内的三家车企实现搭载。

四、蔚来“自动紧急避让 AES”有哪些特性是“行业唯一”?
蔚来“自动紧急避让 AES”在触发速域、识别对象、场景覆盖上,均处于行业领先地位,并有三个“行业唯一”。
行业唯一“覆盖中低速至超高速范围”:蔚来“自动紧急避让 AES”可在60-150km/h速度范围内响应,覆盖速域范围行业最广。
行业唯一“响应行人鬼探头”:蔚来“自动紧急避让 AES”可以在自车80km/h速度以上,以转向躲避鬼探头的行人。
行业唯一“实现夹心场景下防被追尾”:蔚来“自动紧急避让 AES”行业首创应对连环追尾夹心场景,可在前车急刹车、自车60km/h以上、后车相对速度15km/h以上的场景下,实现主动避让。
这三个“行业唯一”,有效覆盖了潜在风险较高的真实场景,扩展了“自动紧急避让 AES”的响应范围,提高了避险能力的上限。
五、蔚来为什么要针对“夹心”场景进行“自动紧急避让 AES”的设计?
“夹心”场景是“被追尾”场景中一个常见的细分场景,根据蔚来对事故与潜在风险的数据统计,“夹心”场景占被追尾场景的比例达到35%。而且在三车连环追尾中,位于中间的车辆受到的伤害也是双重的。因此,蔚来专门针对“夹心”场景,进行了“自动紧急避让 AES”响应的设计,这也是行业首个既可以避免前碰风险,也可以避免后向被追尾风险的“自动紧急避让 AES”功能。
在后车与自车相对速度较高的情况下,以“自动紧急避让 AES”实现避险更有效率。尤其是当后方车辆为大货车类型时,“自动紧急避让 AES”带来的安全收益比急刹车更高。

六、如果“自动紧急避让 AES”触发后,与相邻车道车辆发生碰撞怎么办?
蔚来“自动紧急避让 AES”在功能触发前,已经对自车前进路径、左右车道线是否为实线、左右相邻车道的空间、左右相邻车道是否存在前后车辆或障碍物、后车车距与速度进行了全面扫描与计算,只有在变道路径上没有任何影响因素的情况下,“自动紧急避让 AES”才会触发。任一条件不满足,“自动紧急避让 AES”均不会触发,“自动紧急制动 AEB”会介入工作。
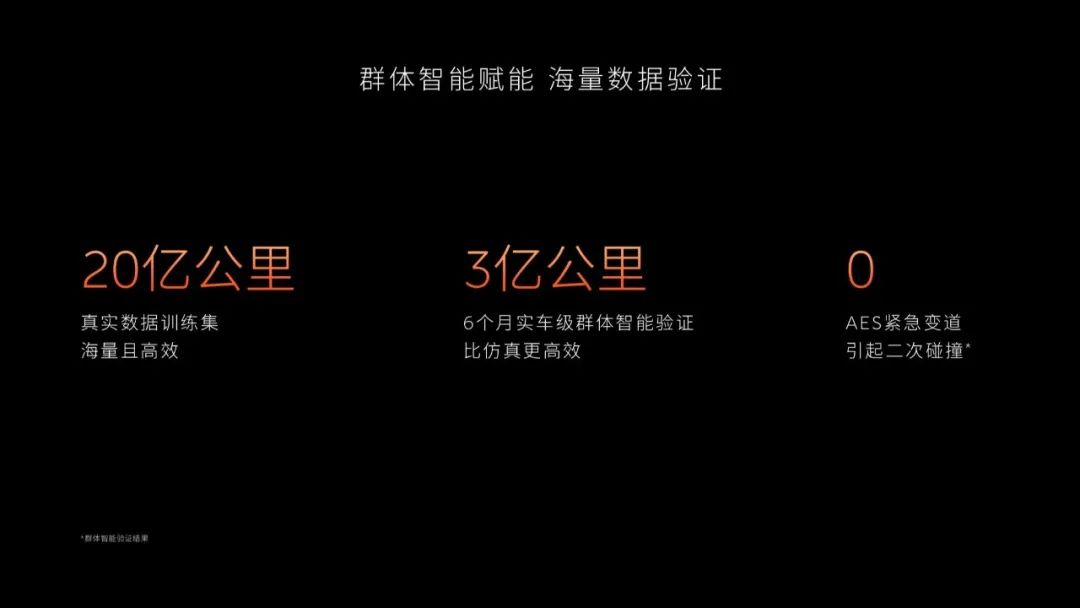
同时,蔚来在“自动紧急避让 AES”功能推送前,以群体智能的技术手段进行了超过3亿公里的真实场景运行测试,严格满足100万公里误触发小于1次、因误触发导致碰撞概率1亿公里不多于1次的苛刻指标,用户可以安心使用。

七、“自动紧急避让 AES”触发后,如果驾驶员打方向盘或者踩刹车,车辆听谁的?
在今天所有能够合法行驶在公开道路的量产汽车上,人的意志都是汽车执行操作的最高优先级。
当蔚来“自动紧急避让 AES”功能触发过程中,如果驾驶员踩制动踏板超过了预设的范围,或是紧急往反方向转方向盘,“自动紧急避让 AES”都会中断。
如果驾驶员转方向盘与“自动紧急避让 AES”转向的方向相同,且人为输入力矩小于避免事故所需力矩,“自动紧急避让 AES”不会中断。但如果人为输入力矩大于避免事故所需力矩,“自动紧急避让 AES”会退出,按照驾驶员的操作进行。

八、“自动紧急避让 AES”和“自动紧急制动 AEB”之间会发生冲突吗?
蔚来从真实场景出发,对“自动紧急避让 AES”进行高标准正向设计,并与“自动紧急制动 AEB”进行了深入融合,可根据场景自主进行“自动紧急避让 AES”与“自动紧急制动 AEB”的最优解选择,两者协同工作,不把功能开关交给用户决策。
总体来看,两者之间的协同遵循如下原则:
当“自动紧急避让 AES”与“自动紧急制动 AEB”均可避免事故,但“自动紧急避让 AES”更有效时,“自动紧急避让 AES”介入。
当“自动紧急制动 AEB”无法避免事故,但“自动紧急避让 AES”可以避免事故时,“自动紧急避让 AES”介入。
当“自动紧急避让 AES”无法避免事故,但“自动紧急制动 AEB”可避免/缓解事故时,“自动紧急制动 AEB”介入。
当“自动紧急避让 AES”,“自动紧急制动 AEB”均无法避免事故时,“自动紧急制动 AEB”介入。
九、“自动紧急避让AES”最大的量产难点是什么?
“自动紧急避让 AES”的量产难点主要有三个:验证周期长、验证成本高、对误触发有极为苛刻的要求。
传统开发流程中智能安全的功能验证,需要使用路测车进行各种工况的真实测试。但这种测试的效率很低,想要充分验证,就必须有大规模的路测车队。而且,“自动紧急避让 AES”的危险度相比“自动紧急制动 AEB”更高,触发条件更苛刻,误触发的体验对用户更缺乏安心感,因此验证的难度也要数倍于“自动紧急制动 AEB”。这是目前量产“自动紧急避让 AES”功能寥寥的主要原因。
而蔚来在售全系车型因为具备群体智能的技术手段,可以大幅提升新功能验证的效率。蔚来在“自动紧急避让 AES”推送前,首先在云端进行了20亿公里累积的事故数据的大规模测试验证,并在车端全场景下进行6个月超过3亿公里的功能运行测试,确保功能得到充分的复杂真实场景的长里程验证。这也是蔚来能够快速、高效量产具备丰富功能的“自动紧急避让 AES”的先决条件。
十、“自动紧急避让 AES”是不是在挑战“让速不让道”的安全意识?
因为智能电动汽车感知能力和计算能力的不断增强,智能安全的进化也在近年来不断加快。“自动紧急避让 AES”作为智能安全领域的一项全新功能,在用户中的认知是薄弱甚至是陌生的。但是,蔚来推送“自动紧急避让 AES”功能,并非是为了炫技,而是在自身智能安全产品节奏下的合理推进。
2024年,蔚来全球首个将端到端大模型技术架构应用于智能安全,包括行业首个将“通用障碍物预警及辅助 GOA”用于智能安全、行业首个将端到端大模型用于“自动紧急制动 AEB”。而在以AI手段解决了以中低速为主的城市场景安全的基础上,蔚来继续扩展中高速战场,通过“自动紧急避让 AES”的开发,以更高效率解决相对速度较高时的安全问题。
所以,“自动紧急避让 AES”的量产,并且与“自动紧急制动 AEB”高度兼容的设计,代表蔚来以新的视角来看待“避险”,以“主动识变、应变求变”的原则面向复杂变化的真实风险场景,从而为用户创造既有主动制动,也有主动避让的安全新高度。




文章原文
